



 微信
微信
公司地址:山东省济宁市高新区第九工业园
电话:+86 15169077601
E-MAIL:nikki@yanmingrobot.com
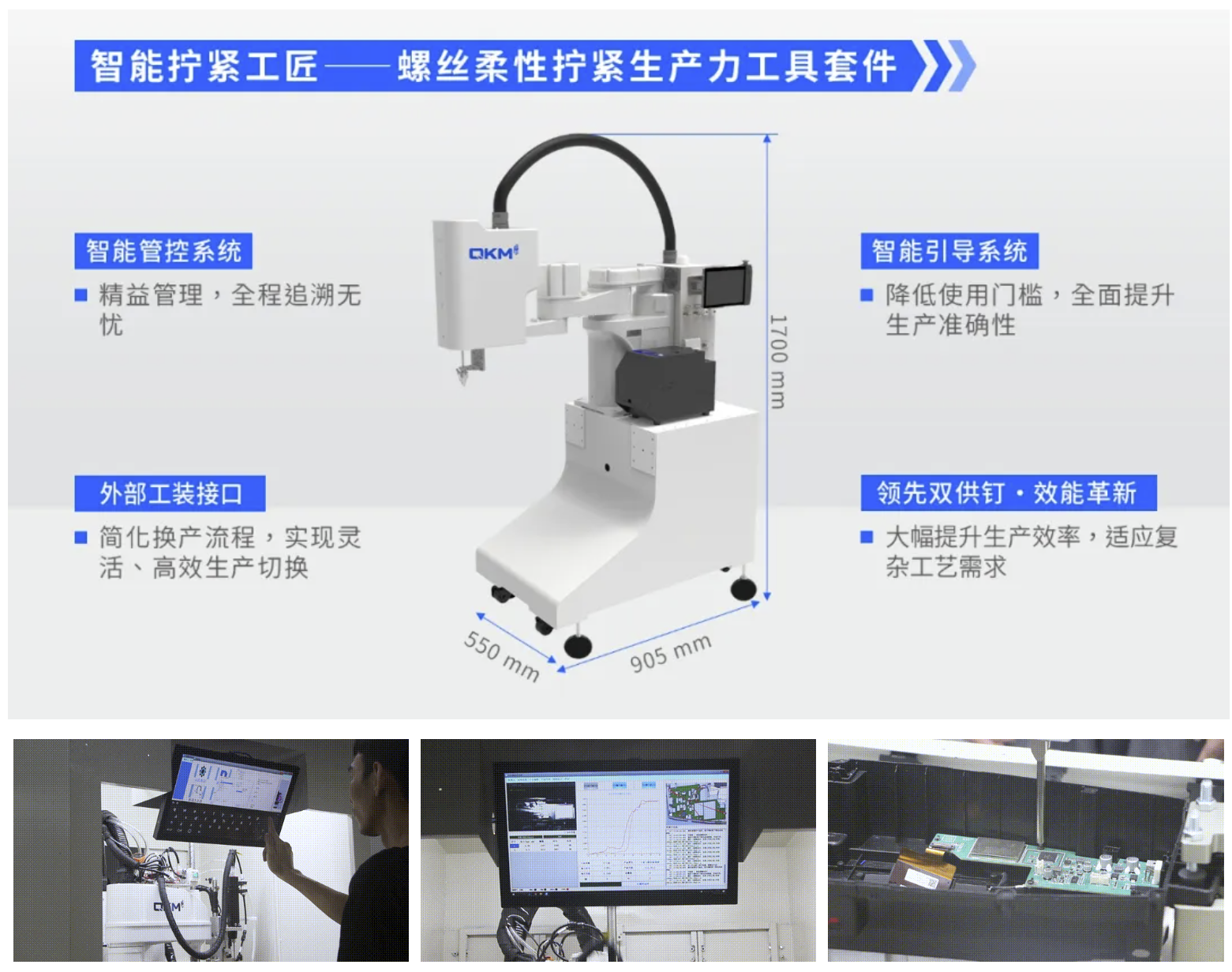
工业机器人常见技术问题解析
—— [妍明智能] 专家团队为您排忧解难
1. 精度下降/轨迹偏移 | Accuracy Drift & Path Deviation
症状 Symptoms
焊接/装配位置出现毫米级误差
重复定位精度超出标称值(如±0.1mm→±0.5mm)
根本原因 Root Causes
✔ 机械磨损 Mechanical Wear:谐波减速器/齿轮箱寿命到期(通常6-8年)
✔ 温度影响 Thermal Effects:未预热或环境温度波动超过±5°C
✔ 负载失衡 Payload Issues:未做TCP校准或末端工具超重
妍明智能 解决方案
�� 快速诊断包:通过ABB RobotStudio® 3D轨迹分析

2. 通信中断/信号丢失 | Communication Failures
高频故障场景 Common Scenarios
DeviceNet/Profibus 信号断续(85%因接地不良)
机器人无法与PLC交换IO数据
预防措施 Prevention Tips
✔ 使用屏蔽双绞线(STP)并单点接地
✔ 避免与变频器电缆平行走线(间距>30cm)
3. 奇异点报警 | Singularity Alarms
为什么6轴机器人会"卡住"?
当4/5/6轴接近同一直线时,数学上无法解算逆运动学
4. 碰撞后恢复 | Post-Collision Recovery
错误操作 vs 专业流程
不要:直接重启 → 可能导致二次损伤
✔ 我们的标准服务流程:
力矩传感器数据诊断
谐波减速器背隙检测
全轴伺服增益调校

5. 新时代挑战:数字孪生不同步 | Digital Twin Desynchronization
虚拟与现实为何"脱节"?
物理传感器数据延迟 >50ms
CAD模型未更新实际磨损量
妍明智能 创新方案
�� 自适应孪生系统:通过边缘计算实现:
实时补偿误差 <5ms
预测性维护准确率 ↑40%
为什么选择妍明智能?
✔ 8年专注中国制造业场景
✔ 50+成功解决的技术疑难案例库
✔ 48小时应急响应承诺
了解更多 ABB机器人
scara机器人|水平多关节机器人|李群机器人|ABB机器人|库卡机器人|安川机器人|六轴工业机器人