ADDRESS: Ninth Industrial Park, Hi-Tech Zone, Jining, Shandong, China
TEL:+86 15169077601
E-MAIL:nikki@yanmingrobot.com
QKM robot first introduces the characteristics and applications of scara robot, as well as specific technical indicators and parameters
scara robots, also known as selective compliant assembly robot arms, or horizontal multi-jointed robots, are a configuration widely used in industrial robot homes. It usually consists of a vertical node and a set of horizontal nodes, and usually has 4 degrees of freedom, including translation in the X, y, and z directions and rotation about the z axis. scara machine has small attributes, fast speed, suitable for fast sorting, precision assembly and other work. Mainly used in 3C industry, food industry and other fields. In addition, scara can also be used for object handling, such as transferring products from one loading area to another.
SCARA robots, also known as developmental level multi-joint industrial robots or Selective compliance robotic arms, are a method of socially rotating joints in three directions and a Chinese mobile joint robot. SCARA robot, choosing compliant assembly robot arm, has the following main working characteristics:
1. High precision: Due to its precise mechanical structure and advanced control technology, scara robots have very high positioning accuracy of aircraft, suitable for missions requiring precise operation.
2. High speed: This robot is designed for high-speed repetitive work, which can complete a lot of work in a short time and improve production efficiency.
3. Strong plane positioning: scara robot has three rotating joints and one straight joint, making it very flexible in the horizontal plane movement, especially suitable for two-dimensional plane assembly, handling and packaging work.
4. Small size and high flexibility: Compared with other types of industrial robots, SCARA robots are generally more compact, take up less space, and can work efficiently in narrow work areas.
5. Low cost: Compared with more complex equipment such as six-axis robots, Scara robots have lower cost and higher cost performance.
6. Simple control: The control mode of SCARA robot is usually based on teaching or programming, and the operator can directly teach or write programs to control the trajectory and action of the robot.

In terms of applied research, SCARA robotics technology is widely used in the following industries and tasks:
●3C electronics industry: used for precision assembly, testing, dispensing, coating and other work.
● White goods industry: assembly, handling and packaging on production lines.
● Plastic hardware industry: parts assembly, grinding, welding and other processes.
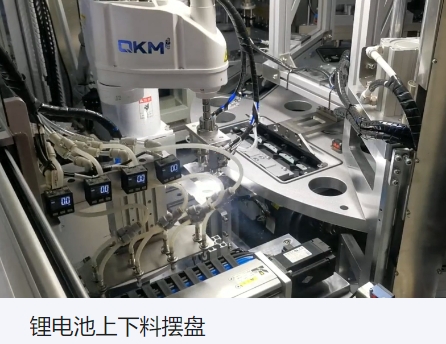
● New energy industry: battery assembly, component handling, etc.
Automotive electronics: Assembly and testing of automotive components.
● Food and pharmaceutical industries: aseptic assembly and packaging in a clean room environment.
●LED industry: LED chip assembly and testing.
* Toy watch industry: Assembling and testing precision components.
● Mechanical seal industry: in the need of high-precision assembly.
In general, because of its high precision, high speed and powerful plane positioning ability, Scara robots are often used in production environments that require fast, accurate and repetitive operations, which can significantly improve production efficiency and product quality. At the same time, its relatively low cost and simple control mode also make it an ideal choice for many manufacturing enterprises to improve the level of automation.
For different manufacturers and application scenarios, the specific specifications and parameters of SCARA robots will be different. Here are some common specifications and parameters:
1. Working range: The maximum distance that the robot arm can reach, usually in horizontal and vertical directions.
2. Load capacity: The maximum weight that the robot can carry.
3. Repeated positioning system accuracy: the accuracy that the robot can achieve when it repeatedly performs the same task.
Joint speed: The speed of the robot's joints, usually expressed as angles or linear distances per minute.
5. Control mode: For example, it can be controlled by programming, manual operation or other means.
6. Programming language: language for programming robots, such as Python, C++, etc.
7. Communication interface: Type of interface to communicate with external devices, such as Ethernet and serial ports.
8. Power management requirements: working voltage and current of power supply required for robot development.
9. Size and weight: the overall size and weight of the robot to determine its suitability in the working environment.
These product specifications and parameters may vary depending on the specific SCARA robot model and application development needs. When selecting and using SCARA robots, it is recommended to refer to the detailed design specification sheet and technical development documentation provided by the manufacturer to ensure that it meets its specific work capability requirements.
According to their structure and application, what are the types of industrial robots?
In the next video we'll talk about how to classify them.
Learn more QKM robot
QKM robot |SCARA robot |ABB robot | Kuka robot | Yaskawa robot |6 axis industrial robot
Article from the Internet




 whatsapp
whatsapp